




Эта статья в первую очередь написана для тех, кто уже сделал первые шаги в мир радио-вертолетов: есть настоящая (а не «игрушечная») модель, есть приличное радио, и возможно уже сделано несколько попыток первых осторожных и нервных взлетов. И если остался задор и желание продолжать и дальше тратить время и деньги, но «упереться» и через несколько месяцев уверенно полететь, то эта статья немного поможет в этом.
Зачем программировать полетные функции.
Для начала немного теории. Подъемная сила модели вертолета образуется за счет работы главного ротора (многороторные и соосные модели мы не рассматриваем ввиду их ничтожно малого количества). Кроме того, за счет управления циклическим (переменным в зависимости от положения лопастей) изменением шага (угла атаки лопастей) ротор является главной управляющей функцией по крену и тангажу. Возникающий при вращении ротора реактивный момент (отдача) компенсируется хвостовым ротором, который так же за счет изменения шага лопастей управляет функцией рысканья (разворота вокруг оси) вертолета. Помощь в компенсации реактивного момента при его резком изменении (перегазовке) оказывает электронный гироскоп (стабилизатор) так же автоматически изменяющий шаг хвостового ротора.
Из сказанного следует: для адекватного и линейного управления полетом вертолета по всем трем осям обороты на главном и хвостовом роторе должны быть максимально стабильны, а ход управляющих сервоприводов и реакция гироскопа соответствовать режиму полета.
Поэтому смысл основных настроек вертолета сводиться к следующему:
1) Запрограммировать такое соотношение графиков (кривых) шага (общего угла атаки лопастей главного ротора) и газа (оборотов двигателя), которое при различных эволюциях модели в полете обеспечивали бы равномерные и стабильные обороты на главном и хвостовом роторах;
2) Запрограммировать такое соотношение между движением ручки управления (по крену «roll», тангажу «nick» и рулю-хвостовому ротору «rudder») и ходом (отработкой) управляющих сервоприводов, чтобы модель управлялась легко и адекватно в разных режимах полета;
3) Запрограммировать чувствительность и режимы гироскопа таким образом, чтобы гироскоп надежно удерживал вертолет в заданном направлении при резких эволюциях, перегазовках, порывах ветра, но при этом не оказывал сопротивления при выполнении пируэтов и других фигур с разворотом модели.
Надо отметить, что существенную помощь в п. 1) может оказать электронный говернон – контроллер и стабилизатор оборотов двигателя. Настройки говернона – это возможная тема для других статей.
Какие режимы полета надо программировать.
Управление программами в передатчике должно быть выведено на три основных тумблера:
1) Тумблер «режим полета» («fly mode»);
2) Тумблер «режим гироскопа» («gyro»);
3) Тумблер «авторотация» («hold»).
Эти тумблеры должны быть удобно расположены и переключаться «на ощупь».
Обычно в моделях настраиваются следующие режимы полета («fly mode»):
«нормальный» или «normal» - взлет, посадка, статические фигуры (висение), медленные пролеты;
«пилотажный-1» или «idle 1», «akro» - пилотирование большинства фигур пилотажного комплекса;
«пилотажный-2» или «idle 2», «akro 3d» - пилотирование некоторых фигур пилотажного комплекса и свободное пилотирование (3-Д);
«авторотация» или «hold», «autorot» - посадка модели с выключенным двигателем.
Никогда не надо думать: «я только учусь, этот режим мне не нужен», «я не собираюсь летать 3-д, зачем мучаться с настройками». Все настройки для каждого вертолета надо делать сразу и в полном объеме.
Важно:
- Все значения настроек в этой статье (градусы, проценты) приведены для ДВС вертолетов .60-класса, то есть с главным ротором диаметром ок. 1600мм и весом до 6кг. Для моделей других размеров значения немного отличаются.
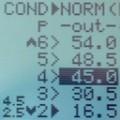
- Фотографии графиков настроек сделаны с аппаратуры вертолета PredatorGasser, в них есть отличия от описанных «идеальных», связанные с полетными подстройками к данной конкретной модели.
- Наименование режимов в разных аппаратурах может быть различным.
- Графики для упрощения описаны по 3-м точкам (начальная, средняя, конечная).

|
Начальные предустановки.
Вертолет собран точно по инструкции, установлен мотор, сервоприводы и радиооборудование. Теперь надо задать начальную, «нулевую» точку во всех управляющих узлах и деталях.
Для этого включаем передатчик, выбираем тип модуляции для приемника («ppm», «pcm» или «spcm», «qpcm» ). Выбираем тип модели (вертолет – «helicopter»), устанавливаем тип микшера общего шага - обычно это или «heli-1» для моделей с отдельным сервоприводом на шаг и двумя сервоприводами на шайбу перекоса, или «heli-3» для моделей с тремя сервоприводами на шайбу перекоса. Устанавливаем направление вращения ротора (правое или левое, задается конструкцией модели), вводим название модели.

|
Передатчик не выключаем, ставим ручки управления в среднее положение.
Включаем бортовое питание вертолета и не трогая, не двигая модель ждем несколько секунд активацию гироскопа (это очень важное условие, так надо делать при каждом включении).
Теперь начинаем проверку положения тяг, рычагов, качалок и сервоприводов.
1) Качалки всех сервоприводов устанавливаем так, чтобы между качалкой и тягой угол был около 90 градусов;

|
2) Изменяя длину тяг устанавливаем шайбу перекоса горизонтально, перпендикулярно валу главного ротора;
3) Изменяя длину тяг устанавливаем рычаги пичкомпенсатора горизонтально, перпендикулярно валу главного ротора;
4) Изменяя длину тяг устанавливаем рычаги микшеров шага горизонтально, одновременно установив шаг (угол атаки) лопастей главного ротора в пределах +1, +2 градуса. Измерение шага всегда производим в посредине каждой лопасти;

|
5) Складываем лопасти хвостового ротора в одну сторону, и изменяя длину тяги сервопривод-рычаг шага устанавливаем постоянный шаг так, чтобы между концами лопастей было расстояние (просвет) около 2 см. Этот постоянный шаг должен компенсировать реактивный момент главного ротора.

|
Настройки начнем с «нормального» или «normal» режима.
Нормальный режим - это взлет, посадка, статические фигуры (висение), медленные пролеты. А значит, вертолет должен управляться очень точно и мягко.
График шага («pitch curve») начинается (ручка управления «шаг-газ» в положении 0%) обычно с -4, -3 градусов лопастей главного ротора. Отрицательный шаг нужен для того, чтобы при раскрутке ротора модель не пыталась взлететь, а при посадке спуск и приземление модели были управляемыми. И то и другое очень важно при полетах в ветреную погоду.
Следующая точка графика (ручка управления в положении 50%) настраивается как +3, +4 градуса общего шага. Я советую это делать так, чтобы вертолет в этой точке «почти взлетал», а примерно при 55%-60% ручки уверенно взлетал и зависал. Начинающим пилотам, привыкшим «висеть» при таком положении ручки управления не надо будет переучиваться при полетах в пилотажных режимах.
Если пока нет опыта – просто устанавливается шаг в точке 2 около +4 градусов, а в полете он подстраивается ручкой «pitch hovering» - она позволяет немного деформировать график шага в средней точке в большую или меньшую сторону.
Последняя точка (ручка управления в положении 100%) примерно равна +9 градусов. В этом положении вертолет должен легко и плавно, без всякой перегрузки мотора, набирать высоту. Важно помнить, о том что участок между точками 2 и 3 прямой и пологий – это важно, ведь на нем производятся все медленные и точные фигуры статические фигуры (зависание).

|
График газа («throttle curve») в вертолете является зависимой функцией от графика общего шага. Поэтому настраивать его надо для обеспечения постоянных стабильных оборотов главного ротора.
Итак первая точка (ручка управления «шаг-газ» в положении 0%) – это точка при которой мотор заводится и работает на холостых оборотах – обычно составляет 15-18% от максимального газа.
Следующая точка графика (ручка управления в положении 50%) настраивается так, чтобы обороты главного ротора поднимались до необходимого постоянного уровня и составляли ок. 1500-1600 об. в мин. Обычно газ при этом составит примерно 60-65% от максимума. Как измерить обороты – с помощью специальных бортовых и дистанционных тахометров, или, при определенном опыте, оценивая реакции модели. Если пока нет опыта и тахометра – просто устанавливается газ в точке 2 около 60%, а в полете он подстраивается ручкой «throttle hovering» - она позволяет немного деформировать график газа в средней точке в большую или меньшую сторону. Напомню так же, что крайне опасно подходить к вертолету с вращающимся ротором и производить замеры обычным тахометром!
Последняя точка (ручка управления в положении 100%) примерно равна 85-90% от максимального газа. В этом положении мотор без всякой перегрузки поднимает вертолет с набором высоты, а обороты на роторе остаются неизменными (ок. 1500-1600 об. в мин). Такими же неизменными и стабильными обороты должны оставаться на всем участке от точки 2 до точки 3.

|
Настройка экспоненты и хода крена, тангажа, руля («expo/dual rate»). В «нормальном» режиме вертолет в основном висит, или медленно летает. Эти эволюции он делает на сравнительно небольшой высоте в опасной близости к земле. Поэтому для большей точности управления, есть необходимость уменьшить ход сервоприводов «dual rate» по крену «roll», тангажу «nick» до 60-70% от максимума, а по рулю - хвостовому ротору «rudder» до 80-90% от максимума. В этом случае, модель относительно спокойно реагирует на ручки управления, что позволяет управлять ею достаточно точно. Для еще большей точности можно ввести экспоненциальную зависимость «expo» около 20% между ходом ручки управления и сервоприводом. В этом случае, возле среднего положения ручек ход серво будет еще меньшим и точным. Все эти параметры надо испытать при разной скорости ветра (чем больше ветер – тем больше ход серво) и добиться для себя разумного компромисса. Если аппаратура это позволяет, можно отдельно переключать экспоненты/ход для разных погодных условий.

|
Функция кривой шага хвоста («revo») с последними поколениями гироскопов несколько утратила свое значение. Немногие моделисты продолжают с ее помощью настраивать кривую шага хвостового ротора «tail rotor curve» для дополнительной, очень точной компенсации реактивного момента главного ротора. Важно помнить, что эта функция обязательно должна быть отключена при режиме гироскопа «удержание».

|
Следующая настройка – режим «пилотажный-1» или «idle 1», «akro».
Уже из названия режима понятно, что в нем вертолет должен выполнять какие-то динамические фигуры. А значит, реакции модели должны быть резче, и модель должна иметь достаточный запас мощности (момент). Включение и выключение пилотажного режима надо производить в полете на высоте более 5 м., так как при этих переключениях модель может резко поменять свое положение («дернуться»), а запас высоты обеспечит безопасность управления.
График шага («pitch curve») начинается (ручка управления в положении 0%) обычно с -6, -5 градусов лопастей главного ротора. Отрицательный шаг нужен для того, чтобы при перевороте модели ротором вниз (например в фигурах петля, бочка) обеспечить поддержку модели. Так же, такое значение отрицательного шага позволит производить простые перевернутые пролеты.
Следующая точка графика (ручка управления в положении 50%) настраивается как +1, +2 градуса общего шага. Как и в нормальном режиме в этом случае вертолет будет устойчиво висеть и активно летать примерно при 55%-60% ручки. Последняя точка (ручка управления в положении 100%) примерно равна +10 градусов. В этом положении вертолет должен мощно но без перегрузки мотора набирать высоту.

|
График газа («throttle curve») как всегда настраивается для обеспечения постоянных стабильных оборотов главного ротора. В случае режима пилотажный-1, эти обороты должны составлять ок. 1600-1700 об.мин.
Итак первая точка (ручка управления в положении 0%) обычно составляет 75-85% от максимального газа. Такой газ обеспечит необходимые стабильные обороты при заданном отрицательном шаге.
Следующая точка графика (ручка управления в положении 50%) составит примерно 65-70%. Вертолет легко летает и управляется в этом положении, а мотор не раскручивается (не «взвывает») при низкой нагрузке когда общий шаг около 0 град.
Последняя точка (ручка управления в положении 100%) равна 100% максимального газа. В этом положении мотор без перегрузки мощно поднимает вертолет с набором высоты, а обороты на роторе не «проваливаются» и остаются неизменными (ок. 1600-1700 об. в мин). Такими же неизменными и стабильными обороты должны оставаться на всем участке кривой от точки 1 до точки 3.

|
Настройка экспоненты и хода крена, тангажа, руля («expo/dual rate»).
Для сильного и точного управления ход сервоприводов «dual rate» по крену «roll», тангажу «nick» устанавливают на уровне 90-100% от максимума, а по рулю - хвостовому ротору «rudder» до 100%. Модель точно и активно реагирует на ручки управления, что позволяет уверенно управлять в различных пилотажных фигурах. Для большей точности выравнивания модели в центе ручек («0»-положение) можно ввести экспоненциальную зависимость «expo» около 24-30% между ходом ручки управления и сервоприводом.

|
Функция кривой шага хвоста («revo»)
Если мы пользуемся этой функцией, то новая кривая шага хвостового ротора «tail rotor curve» должна подстраиваться и корректироваться исходя и реакций модели в полете. И еще раз: эта функция обязательно должна быть отключена при режиме гироскопа «удержание».
Следующая настройка – режим «пилотажный-2» или «idle 2», «akro 3d».
Для некоторых фигур стандартного пилотажного комплекса, а так же для 3-д фигур реакции модели должны максимально резким, модель должна иметь высокий запас мощности (момент). Кроме такой «агрессивности», модель должна одинаково (симметрично) летать и управляться в прямом и перевернутом положении.
График шага («pitch curve») начинается (ручка управления в положении 0%) обычно с -10 градусов лопастей главного ротора. Такое значение отрицательного шага позволит производить перевернутые пролеты и абсолютно симметрично максимальному шагу. Следующая точка графика (ручка управления в положении 50%) настраивается как 0 градусов общего шага. Последняя точка (ручка управления в положении 100%) примерно равна +10 градусов. В результате – прямая проходящая ровно через центр осей.

|
График газа («throttle curve») всегда настраивается для обеспечения постоянных стабильных оборотов главного ротора. В случае режима пилотажный-2, эти обороты должны составлять ок. 1700-1800 об.мин.
Первая точка (ручка управления в положении 0%) обычно составляет 100% от газа. Следующая точка графика (ручка управления в положении 50%) составит примерно 75-80%. Вертолет легко летает и управляется в этом положении, а мотор не раскручивается (не «взвывает») при низкой нагрузке когда общий шаг около 0 град.
Последняя точка (ручка управления в положении 100%) равна 100% максимального газа.
В крайних положениях ручки мотор работает мощно и стабильно а обороты на роторе не «проваливаются» и остаются неизменными (ок. 1700-1800 об. в мин). Такими же неизменными и стабильными обороты должны оставаться на всем участке кривой от точки 1 до точки 3.

|
Настройка экспоненты и хода крена, тангажа, руля («expo/dual rate»).
Для агрессивного и точного управления ход сервоприводов «dual rate» по крену «roll», тангажу «nick» устанавливают на уровне до 100%, а по рулю - хвостовому ротору «rudder» до 100%. Модель точно и активно реагирует на ручки управления, что позволяет уверенно управлять в различных пилотажных фигурах. Для фигур пилотажного комплекса можно оставить экспоненты на предыдущем уровне около 24-30%.

|
Функция кривой шага хвоста («revo»).
Все как в предыдущем режиме.
И последний, очень важный полетный режим – «авторотация» или «hold», «autorot».
Авторотация – посадка вертолета с выключенным мотором – завершающая фигура всех пилотажных комплексов. Но прежде всего, режим авторотации – это режим спасения модели в непредвиденных и аварийных ситуациях. Даже «зарулившись» и «потеряв» модель, перед неминуемым падением включив режим авторотации можно избежать фатальных разрушений вертолета. Думаю об аварийном выключении двигателя для безопасности полетов и говорить не надо.
Авторотация должна быть настроена таким образом, чтобы даже с выключенным мотором модель была послушна и управляема.
График шага («pitch curve») начинается (ручка управления в положении 0%) обычно с -6 градусов лопастей главного ротора. Такое значение отрицательного шага позволит снижаться вертолету с постоянной скоростью, при этом поддерживать высокие обороты ротора (раскручивать ротор) набегающим воздушным потоком. Следующая точка графика (ручка управления в положении 50%) настраивается как +2, +3 градуса общего шага. В этом положении модель тормозиться в своем спуске и начинает зависать. Последняя точка (ручка управления в положении 100%) примерно равна +12, +13 градусов.

|
График газа («throttle curve»).
Он очень простой – 0% по всем точкам, мотор выключен. Для четкого отключения мотора возможно придется отрегулировать положение газа «throttle hold position».

|
Настройка экспоненты и хода крена, тангажа, руля («expo/dual rate»).
Для уверенного управления моделью при низких оборотах ротора, ход сервоприводов «dual rate» по крену «roll», тангажу «nick» устанавливают на уровне 100%, а по рулю - хвостовому ротору «rudder» до 100%. Для точности управления в средних точка можно оставить экспоненты на предыдущем уровне около 24-30%.

|
Функция положения шага хвостового ротора («tail rotor position»).
Понятно, что при неработающем моторе в вертолете отсутствует реактивный момент. Поэтому постоянный шаг хвостового ротора этой функцией устанавливается на уровне 0 град. При авторотации хвостовой ротор выполняет только функцию руля. Важно: при включении авторотации а значит и функции положения шага хвостового ротора, гироскоп должен находиться в «нормальном» режиме.
Настройка чувствительности и функций гироскопа («gyro»).
Если на модели используется самый простой гироскоп, то его чувствительность (реакция) устанавливается подстроечным винтом на уровне около 60%, и в дальнейшем так же корректируется вручную по результатом проверочных полетов.
Более дорогие гироскопы имеют отдельный канал (функцию) управления, через который можно управлять по радио режимом работы (нормальный «norm» или удержание «head hold») и его чувствительностью. Достаточно сложно и долго объяснять разницу в этих режимах, можно сказать проще – в нормальном режиме хвост вертолета самостабилизируется (выравнивается) по направлению полета и подвержен небольшим смещениям при боковом ветре, разворотах и эволюциях; а в режиме удержания хвост жестко сохраняет положение, заданное им пилотом и самостабилизация отсутствует. Использование режимов: нормальный – взлет, посадка, полеты, большинство динамических фигур; удержание – статические фигуры, некоторые динамические и большинство 3-д фигур. В обоих режимах чувствительность гироскопа примерно составляет 45-60%. Если при быстрых, прямых пролетах хвост вертолета раскачивается и вибрирует – чувствительность высокая, если же хвост вертолета заметно реагирует на перегазовки, порывы ветра – чувствительность низкая. Достичь компромисса поможет так же подбор размеров лопастей хвостового ротора.
Теперь простая проверка.
Вначале необходимо убедиться в том, что все наши программы работают, а управляющие механизмы на вертолете двигаются легко и без всяких перегрузок. Графически работу сервоприводов в различных полетных режимах можно проследить через функцию «servo test», которая есть в некоторых передатчиках.

|
Теперь включаем поочередно все программы, при этом вручную раскрутив главный ротор перемещаем все ручки управления в крайние точки по нескольку раз. Вертолет должен точно реагировать на ручки, при этом рычаги, тяги и качалки ни во что не должны упираться, не должны быть слышно «гудение» сервоприводов от перегрузки, удары, щелчки и прочие нехарактерные для нормальной работы механизмов звуки.

|
Не забываем проверить работу гироскопа – включив его в «нормальный» режим несколько раз резко развернем хвост вертолета. Шаг хвостового ротора должен автоматически изменяться чтобы противодействовать этим разворотам.
Настройки в действии – пробный полет.
Взлетев на модели, ее необходимо проверить и подкорректировать триммерами («триммировать») для всех режимов – ровного, устойчивого висения и прямого, линейного полета. Положение хвоста модели нельзя корректировать триммером, а только изменяя длину тяги сервопривод-рычаг шага. Это обязательное правило для вертолетов с гироскопами, работающими в режиме «удержание».

|
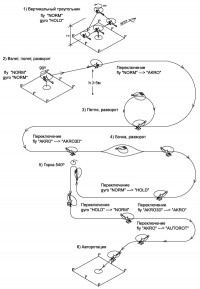
Теперь попробуем немного «полетать» используя наши настройки. Для этого опишу полетные режимы при выполнении нескольких простых пилотажных фигур.
|
1) Режим «нормальный», гироскоп «удержание» - взлет, вертикальный треугольник с пируэтами, посадка;
2) Режим «нормальный», гироскоп «нормальный» - взлет, прямой полет с набором высоты, переключение в режим «пилотажный-1», разворот;
3) Разгон в полете, выполнение петли, разворот;
4) Разгон в полете, переключение в режим «пилотажный-2», выполнение бочки, разворот;
5) Разгон в полете, переключение гироскопа в «удержание», выполнение горки с разворотом 540 град, переключение в режим «пилотажный-1», переключение гироскопа в «нормальный», разворот;
6) Разгон в полете, включение режима «авторотация», посадка.
Желаю успешных полетов!
Дмитрий Деригин
ddsports@ukr.net
Киев, 26.03.2006.














